近日,脊柱外科张小卫、李新友、任志伟教授团队在“O”型臂导航系统辅助下顺利完成一例寰枢椎骨折脱位复位内固定术,取得满意疗效。本例手术的成功实施使交大一附院骨科在复杂及高难度手术方面取得了进展,进一步推动我院脊柱手术向微创化、精准化、智能化方向发展。
患者系老年女性,因高处坠落伤导致寰椎前弓及枢椎齿状突骨折、寰枢椎脱位,四肢活动感觉障碍,随时可能出现延髓损伤、心跳呼吸骤停等危险,若不能及时复位解除神经压迫,患者后期将面临神经功能无法恢复、严重的四肢瘫痪、呼吸功能障碍甚至死亡。我院脊柱外科张小卫、李新友、任志伟教授团队仔细询问病史、详细查体及阅片后,结合前期相关临床经验,急诊予以颅骨牵引临时复位固定,并制定了“O”型臂导航系统辅助下寰枢椎脱位复位内固定术的手术方案。

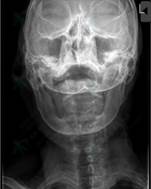
术前X线提示枢椎齿状突骨折、寰枢椎脱位
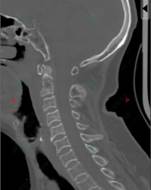

颅骨牵引复位后CT提示骨折脱位复位良好
寰枢椎位于颅颈交界,局部解剖结构复杂且变异大,毗邻延髓、椎动脉、颅神经等重要结构,曾被视为脊柱外科的手术禁区。手术置钉及减压过程中稍有不慎,便可能损伤颈髓或椎动脉,导致四肢瘫痪、大出血,甚至危及生命,手术风险极高,许多专业的脊柱外科医师亦望之却步。因此,传统的寰枢椎手术仍然存在极大的风险和挑战。
“O”型臂导航系统由“O”型臂术中影像和Stealth Station S8手术导航系统组成,可术中为手术医生提供3D立体影像,能让医生手术视角更广、判读脊柱状况更精确,提供精准稳定的置钉路径,避开周围重要的血管神经,大大提高了手术安全性,缩短了手术时间,加快了患者康复。

手术室O-arm及计算机手术导航系统

“O”型臂导航系统辅助下张小卫、李新友、任志伟教授为患者实施手术

导航引导下获取寰、枢椎最佳置钉路径

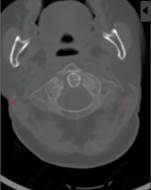
术中O-arm扫描重建图像确定内固定位置良好

术后X线示固定物位置良好,寰枢椎脱位复位满意
在“O”型臂导航系统的辅助下,张小卫、李新友、任志伟教授团队安全顺利地为患者实施了寰枢椎骨折脱位复位内固定术,目前患者正处于术后康复期,病情稳定,术后四肢肌力较术前明显好转,疗效满意。
近期张小卫、李新友、任志伟教授组因齿突不连、寰枢椎失稳行后路钉棒内固定融合术病例展示:
病例一

病例二